Perus Betaflight asetukset 65mm whoop kopterille. Joko oikotienä dump tiedostona, tai käsipelillä asetus kerrallaan.
Betaflight dump – jos ei halua itse säätää
Valmis Betaflight 3.2.4 asetusten dump Betacube/Beta65 varten, jos ei halua itse kaikkea säätää! Voi myös jälkeenpäin säätää yksittäisiä asetuksia.
Dump asetusten käyttäminen
Yhdistä Betaflight configurator, valitse CLI, kopioi ja leikkaa alla oleva teksti ”Write your command here” kenttään, ja paina enter. Tämän jälkeen muista kirjoittaa ”save” ja enter, että asetukset tallentuvat, ja FC uudelleenkäynnistyy.
Configuration:
Perus asetukset. Varmista että valittuna on:
- BRUSHED – Harjalliset nopeudensäätimet & moottorit.
- Motor PWM frequency – 16000 on hyvä arvo useimmiten Whoopeissa.
- MOTOR_STOP – Valinnainen. Moottorit eivät pyöri kunnes nostaa kaasua, paitsi jos Air Mode päällä. Jos törmää niin kaasun nolliin vetäminen riittää moottorien pysäyttämiseen, muuten tarvitsee disarmata.

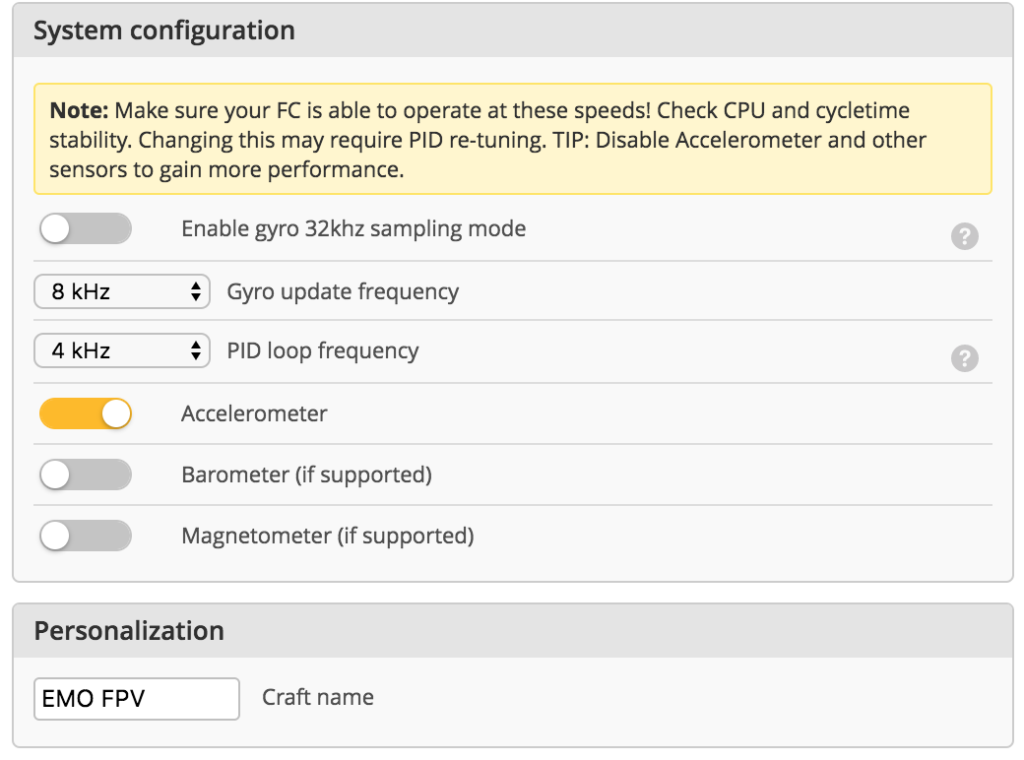
- Gyro update frequency – Gyron datan lukunopeus – isompi on parempi. Merkittävästi lisää prosessorin käyttöastetta.
- PID loop frequency – Kuinka usein FC laskee kopterin asennon korjaus tarpeen, käyttäen PID arvoja ja gyro dataa. Isompi on parempi. Merkittävästi lisää prosessorin käyttöastetta.
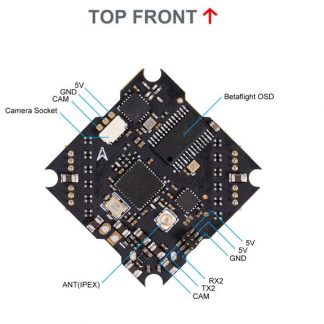
- Craft name – Nimi jonka saa näkyviin OSDn kautta FPV kuvaan.
- SBUS – sisäänrakennettu Frsky vastaanotin käyttää tätä protokollaa.

- OSD – Lisää FPV videoon lisätietoa. Katso OSD välilehti.
- ANTI_GRAVITY – Hieman parantaa kopterin hallittavuutta kun kaasua nostetaan tai lasketaan nopeasti.
- DYNAMIC_FILTER – Parannettu tärinän poistava filtteri. Hieman lisää prosessorin käyttöastetta.

Power & Battery
Ei lennon kannalta vaikuta, mutta vaikuttaa OSD varoituksiin ja ilmoitettuun akun voltteihin. Scale arvoa voi nostaa jos näytetty akun arvo on liian alhainen.
Minimum, Warning ja Maximum kannattaa asettaa näihin arvoihin jos ei halua että OSD varoittaa akusta turhan aikaisin.

PID Tuning
PID – Valinnainen: FCn käyttämät arvot kopterin vakauttamiseen
Whoop lentää ihan hyvin ilman näihin kajoamista. Mutta jos haluaa hieman tarkemman tuntuman niin PID arvot ja filtterit kannattaa muuttaa.
- Proportional, Integral, Derivative – Näytetyt arvot ovat yleensä hyvät Whoop lentoon. Jos on pientä tärinää, voi Proportional ja Derivative laskea hieman.
Rates – Valinnainen: kuinka kopteri reagoi ohjaimen tikkujen liikkeeseen
Isompi deg/s luku on nopeammin reagoiva, ja pienempi on hyvä tarkkaan lentoon. Esim olkkarissa/keittiössä lentoon tuolien ali 400 deg/s on hyvä. Jos haluaa lentää freestyleä ja tehdä temppuja, niin korkeampi, 900 deg/s tai enemmän, on suositeltava.
- RC Rate – Ohjauksen voimakkuus luku.
- Super rate – Exponentiaalinen kerroin RC Ratelle. Tämän avulla saa tikkujen keski alueen vähemmän herkäksi, ja siten tarkemmaksi, kuin ääripäät, joita voi käyttää äkkinäisiä liikkeitä varten.
- RC Expo – Valinnainen. Lisä exponentiaali Super raten lisäksi.
Angle/Horizon
Nämä ovat kiihtyvyysanturin (accelerometrin) avulla vakautetut lentotilat. Horizon on Acron ja Anglen välimuoto. Freestyle lentoon Acro tai Horizon, ja rata ajoon Angle.
- Strength – Tällä säädetään kuinka voimakkaasti kopteri palautetaan vaakatasoon. Oletus arvo on 50, mutta 25 tai 35 pehmentää mukavasti, ja tekee moodista hieman enemmän Acron tuntuisen.
- Angle Limit – Suurin sallittu kallistuskulma. Tällä voi Angle moodissa käytännössä säätää kopterin maksimi nopeutta, pienempi on hitaampi, kun ei voi kallistaa liikaa eteenpäin. Aloittelijalle jopa 25 voi olla hyvä, mutta jos haluaa tehot irti niin 65.
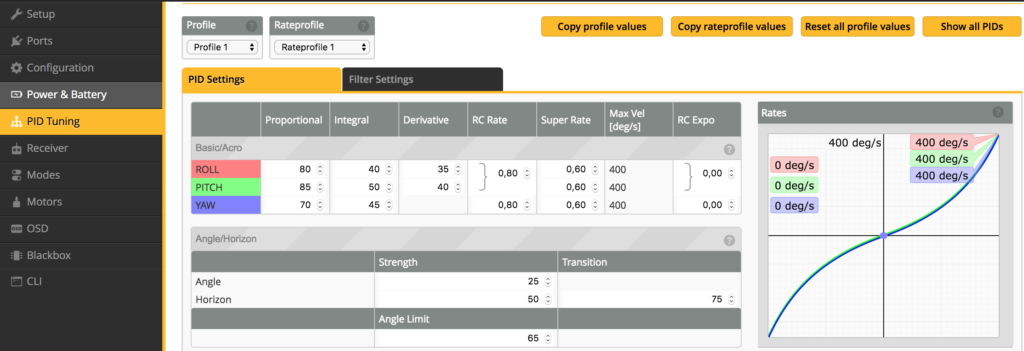
Kisa/sisä/aloittelija ratet esim: RC Rate 0,8 ja Super Rate 0,6 = 400 deg/s
Freestyle/acro ratet esim: RC Rate 0,9 ja Super Rate 0,8 = 900 deg/s
Molemmissa tikkujen keskialue lähes yhtä tarkka, mutta ääripäät paljon maltillisemmat kisa ratella. Näitä voi muokata haluamakseen.

Filter Settings
Asetukset FCn laskennallisille filttereille. Jos kopterissa ei ole paljoa mekaanista värinää joka välittyisi FClle asti, niin filtterit pois päältä pistämällä kopterin reagointi esimerkiksi prop washiin paranee. Whoopeille joissa FC on kumitassujen varassa nämä voi yleensä pistää kaikki pois päältä.
- D-Term Lowpass Filter – PT1 on suositeltava.

Modes:
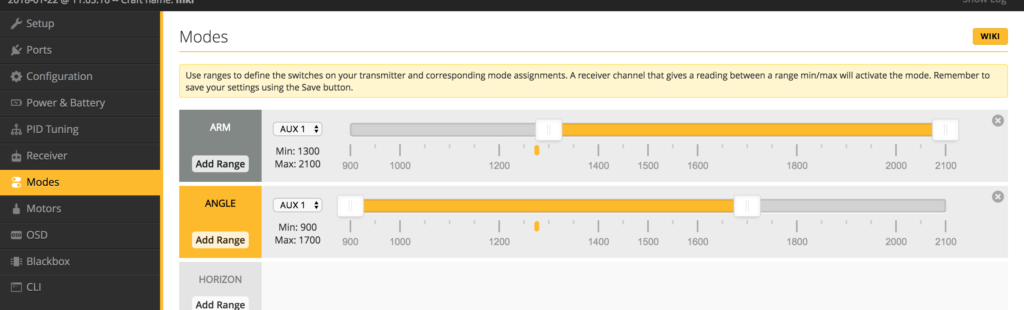
Tänne tarvitsee ainakin valita Arm, ja suositeltava Whoopeille on myös Angle, joka palauttaa kopterin vaakatasoon kun päästää oikeasta tikusta irti. Tämä myös rajoittaa enimmäis kallistuskulmaa, joten esimerkiksi flipit eivät onnistu. Auttaa myös pitämään kopterin pystyssä jos sattuu törmäämään.
Valinnainen – Air mode:
Pitää propellit pyörimässä myös kun kaasu on pois, antaen kopterille liike auktoriteettiä myös siinä tilanteessa. Hyvä freestyle lentoon, eikä niinkään kilpa lentoon.